Learning Friction Model for Magnet-actuated Tethered Capsule Robot
Abstract
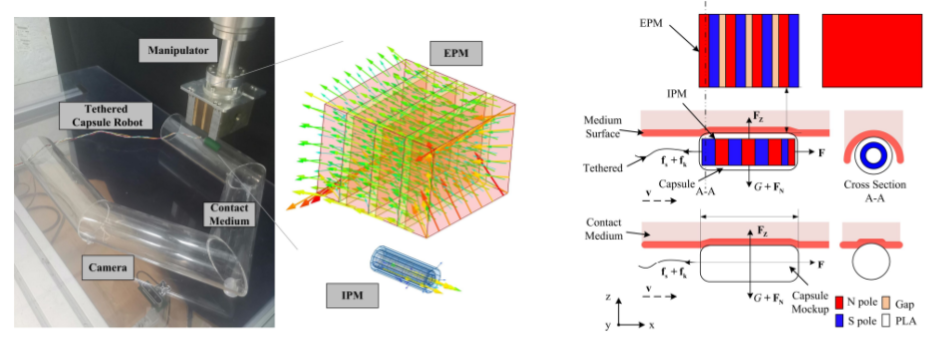
With the potential applications of capsule robots in medical endoscopy, accurate dynamic control of the capsule robot is becoming more and more important. In the scale of a capsule robot, the friction between the capsule and the environment plays an essential role in the dynamic model, which is usually challenging to model beforehand. In the paper, a tethered capsule robot system driven by a robot manipulator is built, with a strong magnetic Halbach array mounted on the robot’s end-effector to actuate the capsule. The friction between the capsule and the environment is learned with demonstrated trajectories to increase the control accuracy. Experimental results shown an improvement of 5.6% in terms of tracking error and the stability of the contact force is improved by about 6.2%.
Video
Acknowledgements
The website template was borrowed from Jon Barron.